
従来の地中探査レーダーシステムは、人力による手押し型(いわゆるハンディタイプ)と、車両等で牽引される車載型に大きく分類されていました。それぞれに長所と短所がありました。
ハンディタイプのレーダーは、比較的狭い面積や複雑な探査経路(探査側線)の調査に適しており、埋設物の位置マーキング(検出)において高い精度が得られます。一方で、広い面積の探査を人力で行うには、作業者の疲労が蓄積し、探査時間も長くなるため非効率です。特に炎天下での作業では、健康への懸念も生じていました。
一方、車載型地中探査レーダーは広範囲の探査において高い作業効率を誇り、短時間で広い面積をカバーできるメリットがあります。しかし、運転操作に依存するため、探査側線が直線的でない場合があり、埋設物や路面下の空洞の位置を正確に把握する点ではハンディタイプに劣ることがありました。さらに、複雑な経路や狭い範囲での探査では、かえって効率が悪化するなどの課題もありました。
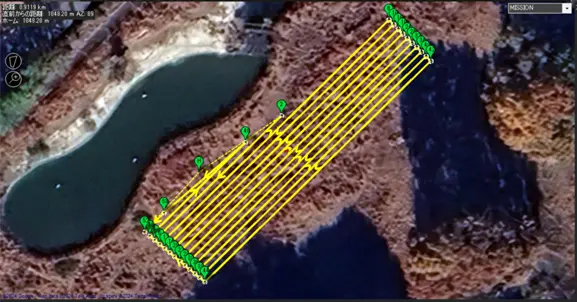
そこで新日本テスコムでは、両方式の長所を活かすべく、ARDUPILOTというオープンソースアプリケーションを活用して、事前に設定したローバーロボットに地中探査レーダーを搭載し、広範囲を自由に走行しながら探査データを取得するシステムを開発しました。

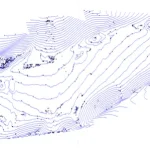
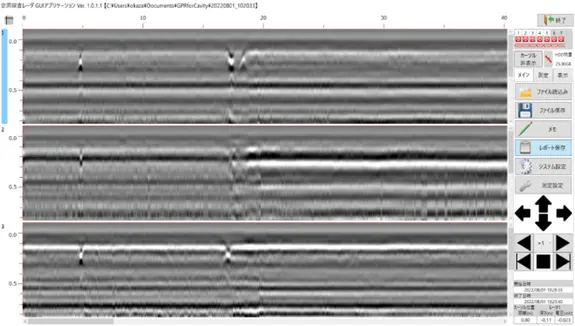
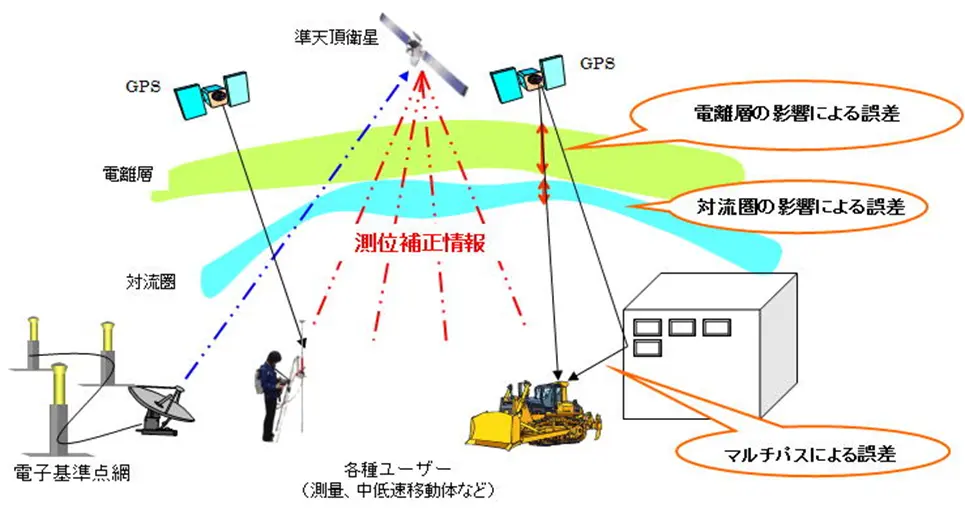
衛星測位による走行位置の制御と、埋設物取得データを時刻管理することで、衛星測位データと照合し、埋設物の位置を正確に検出できるシステムを構築しました。
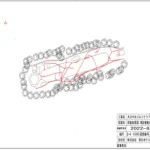
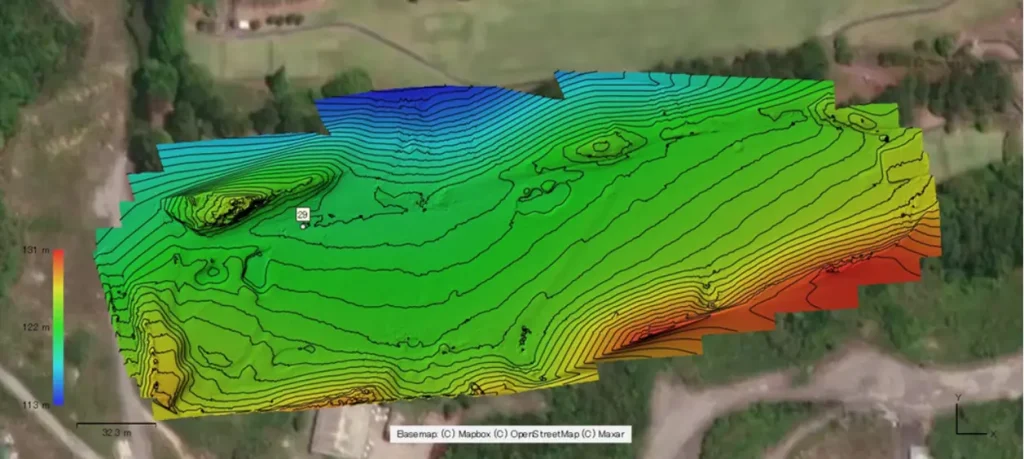
さらに、上空からドローンで測量して作成した平面位置図に、地上で取得した埋設物位置情報を重ね合わせることで、高精度な埋設物位置図面の作成にも成功しました。
この新しいシステムにより、従来手法に比べ、埋設物の平面位置図に深さ情報を加えた図面を、比較的短時間かつ効率的に作成することが可能となりました。